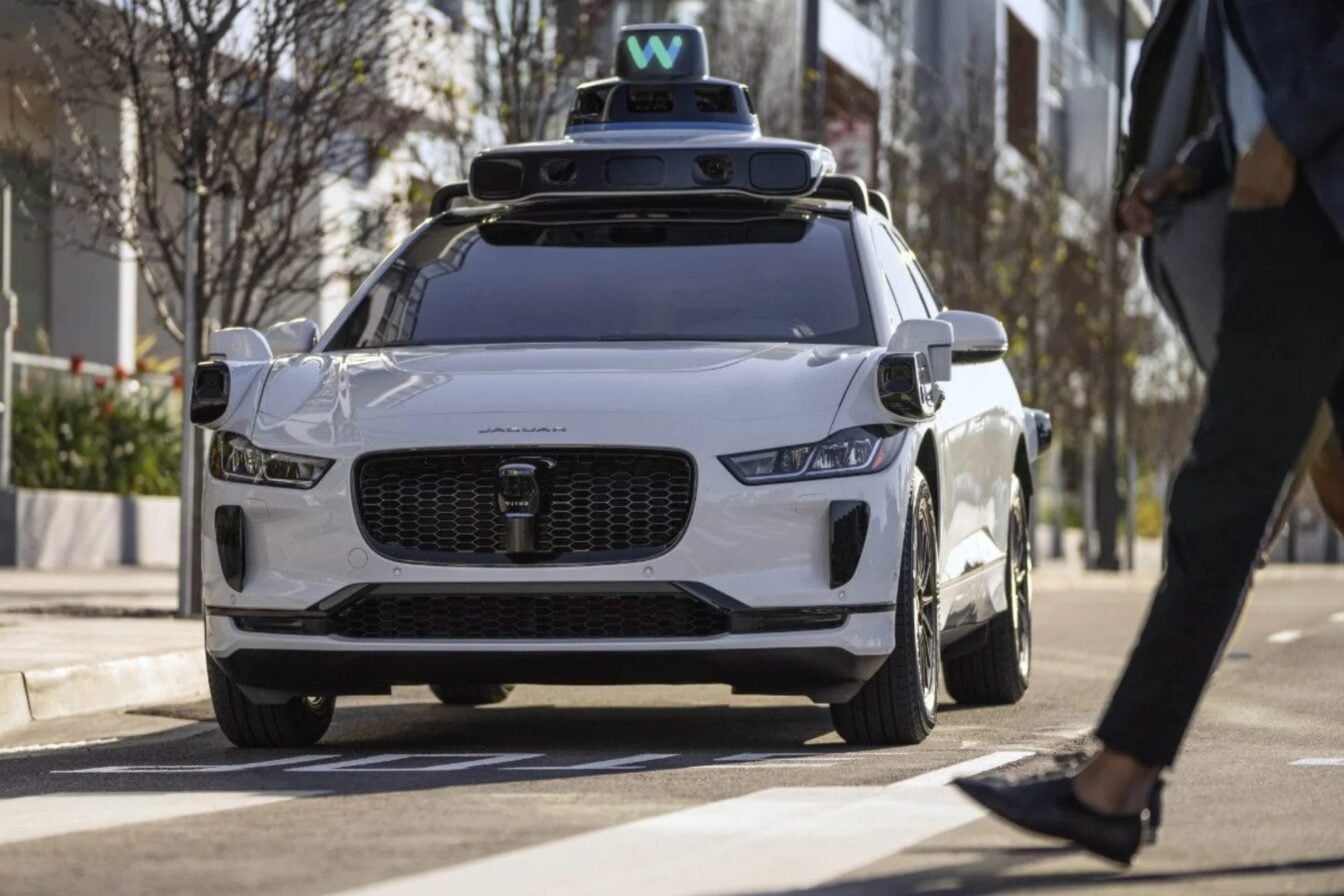
Identifier un feu tricolore, un marquage au sol, un panneau de signalisation ou tout simplement un autre véhicule sur la route… Les véhicules autonomes savent d’ores et déjà plutôt bien le faire. Il y a en revanche, parmi les différents éléments du paysage routier, un élément qu’il est crucial de bien identifier et surtout de bien comprendre : le piéton.
Si nous sommes désormais parfaitement identifiés par l’intelligence des machines et leurs caméras, nos intentions restent pour ces véhicules robots du domaine de l’imprévisible. Pour les aider à nous comprendre, l’institut de transition énergétique (ITE) Vedecom travaille actuellement sur une solution qui permettra par exemple à ces machines de savoir quand nous souhaitons traverser.
Créer des modèles biomécaniques
S’approcher d’un passage piéton, s’arrêter et jeter un coup d’œil au conducteur pour s’assurer qu’il nous a bien vu et nous laisse passer : voilà un comportement qu’il n’est pas facile de partager avec un véhicule autonome. Pas facile, mais pas impossible. Pour y parvenir, Vedecom travaille sur la modélisation et la conversion de la posture du corps humain en un modèle biomécanique compréhensible par l’IA des voitures robots.

Pour cela, il a équipé un humain de 17 capteurs inertiels Xsens, permettant de modéliser le corps de la tête aux pieds en un nuage de 64 points duquel on peut extraire beaucoup d’informations. Le rythme de la marche, la longueur de la foulée, l’orientation de la tête, l’inclinaison du buste… toutes ces données traduisent nos intentions. Par exemple, un adulte ayant entre 23 et 50 ans qui ralentit sa foulée sur 3 à 5 pas à l’approche d’un passage piéton laisse penser qu’il envisage de traverser. S’il s’arrête, détecté notamment par une posture droite du buste, et que sa tête tourne en direction de la voiture, alors celle-ci doit comprendre qu’il souhaite passer.
Au contraire, s’il marche sur le trottoir avec une foulée régulière (la distance et le rythme entre chaque pas ne changent pas) et une posture du corps légèrement vers l’avant, le véhicule considèrera qu’il y a peu de risque qu’il souhaite traverser.
Une solution encore incomplète
Après une longue étape de modélisation de ces comportements humains, Vedecom souhaite ensuite les cataloguer et les intégrer à l’intelligence des voitures. Des modèles biomécaniques qui constituent des données précieuses pour améliorer leur IA. L’objectif étant de s’approcher le plus plus possible du comportement des conducteurs humains.
Une solution intéressante, qui n’est pour autant pas infaillible ni même complète. De l’aveu même d’un porte-paroles de l’ITE, beaucoup de travail reste à faire pour modéliser le comportement des personnes âgées ou encore des personnes se déplaçant en trottinette.
Dans cette démonstration, au moins un élément manque à l’appel selon nous. Il s’agit en l’occurrence d’un outil permettant au véhicule autonome d’indiquer au piéton qu’il l’a bien repéré. Des équipementiers travaillent par exemple à l’intégration d’écrans dans le pare-brise… mais c’est là un tout autre chantier!
👉🏻 Suivez l’actualité tech en temps réel : ajoutez 01net à vos sources sur Google, et abonnez-vous à notre canal WhatsApp.