


Une aventure de plusieurs années va se clôre ces 5 et 6 juin à Ponoma en Californie. Le Darpa Robotics Challenge, prestigieux concours de robotique organisé par la branche recherche de l’armée américaine, se solde cette semaine par une finale après trois années d’épreuves. 25 équipes académiques ou privées restent en compétition. Avec en ligne de mire un Grand prix doté de 2 millions de dollars, une deuxième place avec un million de dollars et une troisième place à 500 000 euros.
Leur mission ? Concevoir un robot d’asistance capable de suppléer l’homme dans des zones sinistrées. Pour cela, leur prototype doit accomplir une succession de tâches physiques sur un terrain simulant une catastrophe. Le tout en semi-autonomie, car les communications seront volontairement dégradées entre les robots et les opérateurs. Un véritable parcours du combattant nécessitant d’ouvrir des portes, de conduire un véhicule, d’actionner des tuyaux d’incendie ou encore de transporter des débris.
Nous vous présentons cinq de ses robots qui se sont distingués durant la demi-finale et qui présentent toutes les qualités pour monter sur le podium.
Running Man d’IHMC Robotics
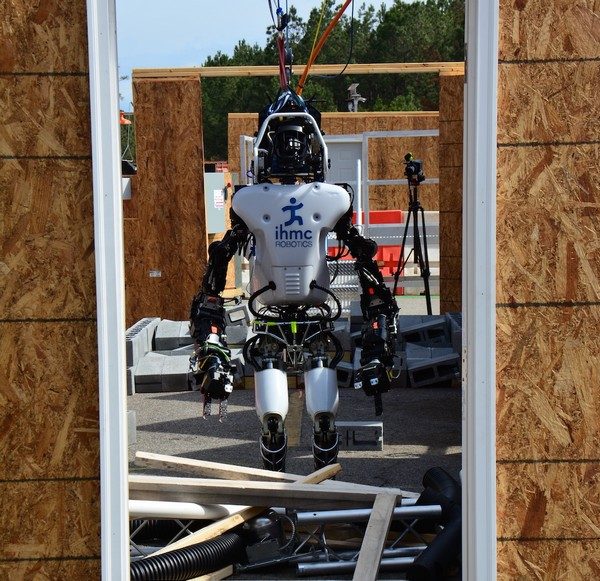
Comme la plupart des robots en compétition, Running Man est une version évoluée du bipède Atlas, fournie gracieusement par Boston Dynamics, désormais filiale de Google. 1,90 m, 175 kilos, c’est une belle bête qui avait terminé à la deuxième place des demi-finales.
Pour remporter l’épreuve ultime, l’équipe d’IHMC Robotics a développé un algotithme capable de contrôler tout le corps de cet humanoïde et de lui permettre de marcher en gardant l’équilibre.
Chimp de Tartan Rescue

Chimp (chimpanzé en français) est un bipède conçu par l’Université de Carnegie Mellon. Ses qualités ? Force, dextérité et précision grâce à ses bras munis de pinces. Il est capable de visualiser son environnement à 360 degrés et de le modéliser en 3D ce qui lui permet de plannifier ses actions.
Lorsqu’il effectue des tâches délicates comme manipuler des outils, il se met sur quatre pattes. Ce qui lui assure une grande stabilité. Ses pieds sont montés sur des chenilles, à la manière d’un tank, ce qui lui permet d’évoluer en roulant sur les terrains accidentés.
Helios du MIT

Là encore il s’agit à la base d’un robot Atlas. Hélios est cependant un peu plus grand (1,95m) et plus lourd (182kg) que le modèle original. L’équipe du MIT a créé des outils permettant de réévaluer à chaque nouvelle situation les limites du robot. C’est l’opérateur qui est chargé de vérifier la sûreté de chaque action préalablement.
Le système de manipulation d’Hélios dispose d’un moteur de cinématique inverse (IK) pour déterminer les positions des membres du corps. De nouveaux algorithmes ont été également développé pour plannifer ses pas.
RoboSimian de RoboSimian

C’est le Jet Propulsion Labs de la NASA qui se cache derrière le RoboSimian. Comme son nom l’indique, ce robot de 70 cm et 125 kg est inspiré du singe. Et bénéficie de toute l’expérience de la NASA en matière de rovers.
Ses quattres pattes, totalement identiques, sont interchangeables, faciles à concevoir et assembler. Elles servent ainsi alternativement de mains ou de jambes suivant les situations. RoboSimian dispose en outre de 28 degrés de liberté, ce qui rend ses mouvements très fluides.
Florian de ViGir
Encore un robot basé sur Atlas. Florian est issu de la collaboration de plusieurs universités. Son prénom a été choisi pour rendre hommage au Saint-patron des pompiers ! Des pinces ont été ajoutées aux bras, ainsi qu’une caméra et des capteurs tactiles électriques. Tous les résultats des recherches sont disponibles en open source.
🔴 Pour ne manquer aucune actualité de 01net, suivez-nous sur Google Actualités et WhatsApp.








